-
Włochate krowy z Czarnocina
Zaciekawiony artykułem w szczecińskim dziale portalu gazeta.pl (akurat dostaję komunikat "strona nie znaleziona", więc link pominę) postanowiłem odwiedzić Park Natury Zalewu Szczecińskiego położony tuż za wsią Czarnocin (koło Stepnicy). Szczególnie zainteresowały mnie "włochate krowy" i żyjące dziko (pół dziko) koniki polskie. Córkę wsadziłem do samochodu, żonę i teściową wysadziłem w centrum handlowym i pojechałem. Nie zawiodłem się, choć wycieczka była raczej z tych dłuższych. Brak przeprawy mostowej na wysokości Polic robi swoje i po zaliczeniu kółka przez Słoneczne dojechałem. A tam, wystarczyło wejść kilkadziesiąt metrów w głąb parku i spotkaliśmy zarówno włochate krowy, jak i konie, ślady bytności bobrów oraz "poobcowaliśmy" z przyrodą.



Największe wrażenie zrobiły na nas konie. Dla miastowego, takiego jak ja, widok małego tabunu koni kroczącego powoli w Twoim kierunku nie jest czymś, czego doświadcza regularnie. Zatrzymać się, po mału wycofać się, a może uciekać gdzie pieprz rośnie? Sam może i bym wytrzymał (może tak, a może nie). Ze względu na córkę wybrałem powolną ewakuację do małej ogrodzonej "zagrody dla ludzi" postawionej chyba specjalnie na tą okazję. OK, konie same z siebie wyraźnie się nie spieszyły i jak na mój gust chciały sprawdzić, czy przypadkiem nie mamy dla nich marchewek lub innych przysmaków. Dwóch włochatych byków podążających za końmi już na pewno bym nie wytrzymał na spokojnie na otwartej przestrzeni.
-
roboCar: Czy te oczy mogą kłamać?

Ok, nie oczy, tylko ultradźwiękowe czujniki odległości. Tak czy inaczej, podstawowe zmysły roboCar w obecnej wersji.
-
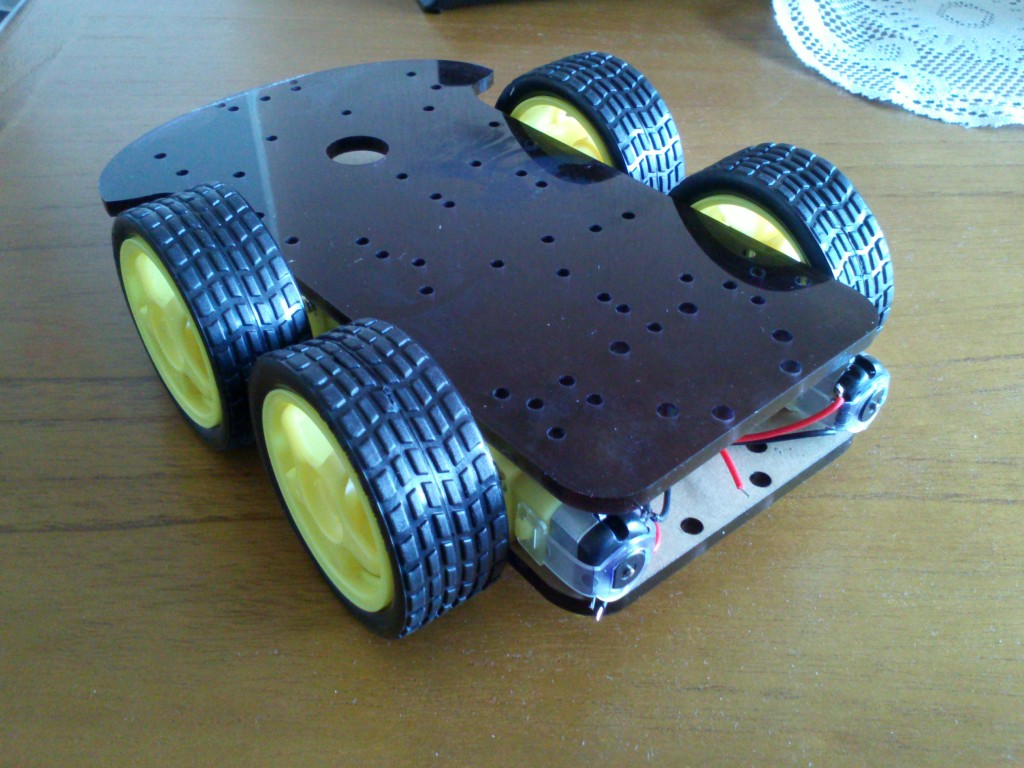
roboCar: pierwsza jazda
Udało mi się dziś skończyć podstawowe funkcje projektu roboCar:
- sterownik silników, przy użyciu układu scalonego L293 o którym pisałem w poprzednim wpisie;
- złożenie układu napędowego "do kupy";
- połączenie podwozia z Arduino i napisanie podstawowych funkcji sterujących: do przodu, do tyłu, stop, w lewo, w prawo;
Pomijając szczegóły, całość wygląda tak:
[gallery columns="1" ids="2646,2647,2649,2648"]
A tak wyglądała pierwsza jazda
-
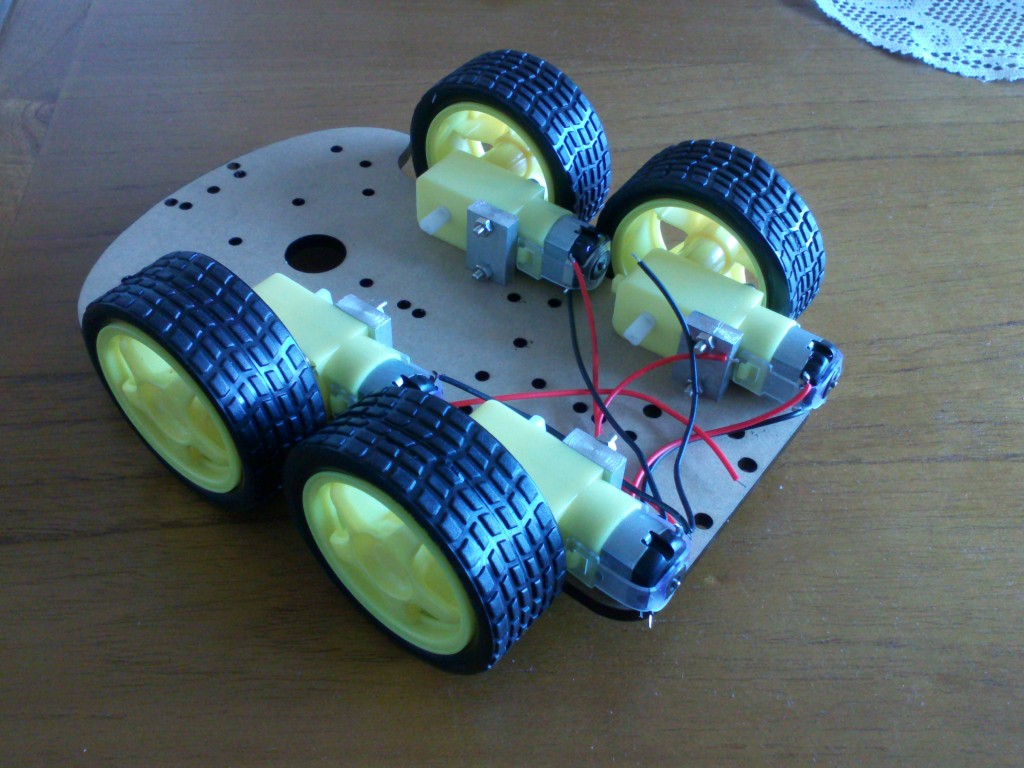
roboCar: silniki uruchomione
Wreszcie zdecydowałem się na nazwę dla mojego robota o którym pisałem dwa dni temu: roboCar. Wiem, mało odkrywcze i oryginalne. Trudno, będzie roboCar.

Tak, czy inaczej, dziś wreszcie odniosłem pierwsze sukcesy: udało mi się spiąć Arduino Uno z podwoziem, czyli mówiąc prosto: sterować silnikami wszystkich czterech kół. Okazało się, że mój oryginalny pomysł z wykorzystaniem mostków Darlingtona i układy ULN2803 był, lekko mówiąc, słaby. Przede wszystkim, nie umożliwiał zmiany kierunku obrotów silników. W połowie zlutowany układ wylądował w szufladzie, a kiedyś może podepnę go do Raspberry Pi.
Godzina googlania, wycieczka na małe zakupy w internetowym sklepie elektronicznym i dziś udało mi się zlutować driver do silników na układzie scalonym L293DNE (wersja ekologiczna, bez ołowiu). 4 mostki H zawarte w L293D wydają się na razie rozwiązywać sprawę. Przy pomocy 4 wyjść (2 cyfrowe, 2 PWM) prosty program potrafi sterować zarówno szybkością silników, jak i kierunkiem obrotów 2 par silników (silniki jednej strony są połączone równolegle). Ładny opis takiego rozwiązania można przeczytać na przykład tutaj (ang).
Nie obyło się oczywiście bez problemów/wyzwań. Po pierwsze, mogę zapomnieć o zasilaniu robota z 4.8V (4x aku AA 1.2V) jak planowałem na początku. Spadek napięcia na L293 jest na tyle duży (około 2,6V), że silniki nie mają dość mocy. Trzeba będzie użyć 9V, co po spadku powinno dać trochę ponad 6V. Po drugie, nie wiem, czy 400mA (4x100mA) to nie za dużo dla pojedynczego L293. Teoretycznie powinien wytrzymać 600mA ciągłego i 1A w szczycie, ale nie wiem. Już po chwili pracy układ jest wyraźnie gorący. Bez radiatora raczej się nie obejdzie.
-
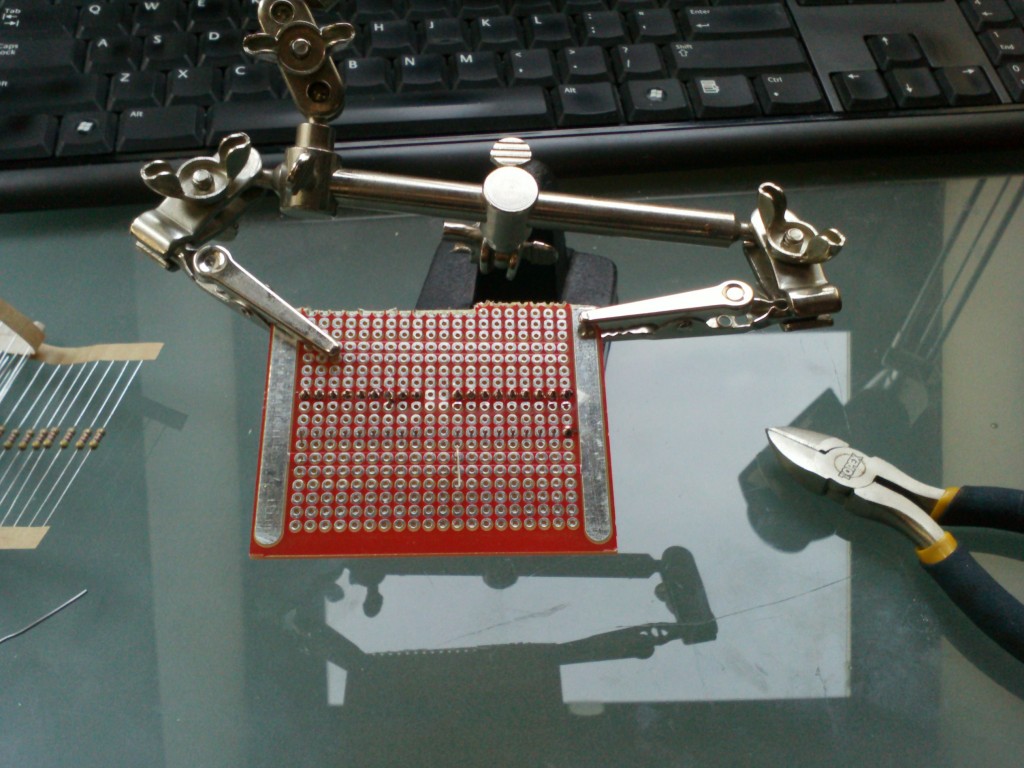
Soldering Hard!
-
Arduino: Projekt Robot
Projekt Robot został dziś oficjalnie rozpoczęty. Nie jest to może najszczęśliwsza nazwa, ale nic lepszego nie mogłem dziś wymyślić. Tak czy inaczej, założenia są następujące:
- mózg: Arduino
- podwozie: modCar z Kamami
- czujniki w wersji podstawowej:
- czujnik odległości
- szukacz światła
- w wersji późniejszej dorzucę pewnie jakieś zdalne sterowanie, na przykład po Bluetooth z telefonu
Plan na dziś: uruchomić silniki, a przynajmniej jeden i sterować nim(i) przez Arduino. Reszta jak czas pozwoli.

-
Gdzie schować Raspberry Pi?
Dobry pytanie. Można kupić obudowę, można postawić bez obudowy, obudowę można też zrobić samemu. Ja, jedną z moich Malinek, tą podłączoną do telewizora i obsługującą RaspBMC postanowiłem ukryć. Gdzie? Za telewizorem, przymocowaną samoprzylepnymi rzepami (Velcro) to jego tylnej ścianki.
 Może nie wygląda to ślicznie, ale co z tego, skoro jest schowane i nie widać. Grunt, że działa. A rzepy mają tą zaletę, że w razie konieczności Raspberry Pi można odczepić i użyć do czegoś innego.
Może nie wygląda to ślicznie, ale co z tego, skoro jest schowane i nie widać. Grunt, że działa. A rzepy mają tą zaletę, że w razie konieczności Raspberry Pi można odczepić i użyć do czegoś innego. -
Raspberry Pi: karta WiFi na USB
Jedną z wad Raspberry Pi jest brak wbudowanej karty WiFi. Kabel sieciowy nie sięga wszędzie, więc karta WiFi na USB jest dobrym pomysłem. Internet mówi różne rzeczy na ten temat, począwszy od braku obsługi niektórych modeli, przez konieczność używania aktywnych hubów USB, aż do absolutnie bezproblemowej współpracy "out of the box". W zależności od modelu, oczywiście.
Skuszony kilkoma pozytywnymi wpisami o karcie TP-Link TL-WN722N postanowiłem dać jej szansę. Głównie w kontekście współpracy z RaspBMC. I w wielkim skrócie: jest dobrze. RaspBMC sam wykrył kartę, miał odpowiednie moduły kernela i karta zadziałała za drugim razem. Za drugim, bo za pierwszym chciałem niepotrzebnie pomóc systemowi i samemu bawić się w konfigurację sieci. Skończyło się na ponownej instalacji. Na czystym systemie nie było już żadnych kłopotów.

-
Arduino: czujnik odległości
Nieśmiało i bardzo powoli zaczynam prace nad projektem opartym na Arduino i wykorzystującym, między innymi, czujnik odległości. W tym przypadku, HC-SR04. Okazało się, że jego obsługa jest banalnie prosta. Schematów nie będę pokazywał, bo wystarczająco dużo tego jest do znalezienia w sieci. O, choćby tutaj.
 Tak, czy inaczej, czujnik działa, jego dokładność miło mnie zaskoczyła, a kosztuje tak mało, że prawie wstyd go nie mieć w "elektronicznej kolekcji".
Tak, czy inaczej, czujnik działa, jego dokładność miło mnie zaskoczyła, a kosztuje tak mało, że prawie wstyd go nie mieć w "elektronicznej kolekcji". -
Raspberry Pi i PCF8574 - kolejne starcie

Kolejne starcie z Raspberry Pi i portem równoległym PCF8574 sterowanym przy pomocy magistrali I2C zakończone sukcesem. Tym razem, na próbę, powtórzyłem podstawy i przypomniałem sobie Pythona. W efekcie, powstała mała "platforma" prototypowa z 4 LEDami i 4 przyciskami.
Schematy, jak i kilka przykładów w Pythonie, udostępnię jak tylko znajdę dłuższą chwilę. Z czym może być niestety ciężko.